EN

相控阵探头以更小的尺寸提供增强的位置精度,无需加快声音校正速度,并降低了对生物污垢的敏感性
深水作业的底部跟踪功能
紧凑的尺寸
多种通信渠道
独立或远程头选项
先进的 AHRS IMU 用于精确的车辆姿态校正
泄漏检测和监测
Trandsducer 和系统运行状况监控
新的可选 XRT(扩展范围跟踪)可将底部跟踪范围增加多达 60%
可升级以包括 ADCP 功能
动态命令功能允许在作期间更改命令,而无需停止 ping 周期或 DVL 的作
底部轨道高分辨率速度和导航参数数据块有助于速度测量、分辨率和质量信息,用于外部卡尔曼滤波器 (EKF) 惯性导航系统 (INS) 解决方案
有效时间输出提供与 INS 的高精度耦合,进一步提高最终的 DVL 辅助 INS 位置精度
低延迟触发器可减轻对其他 SONAR 的干扰
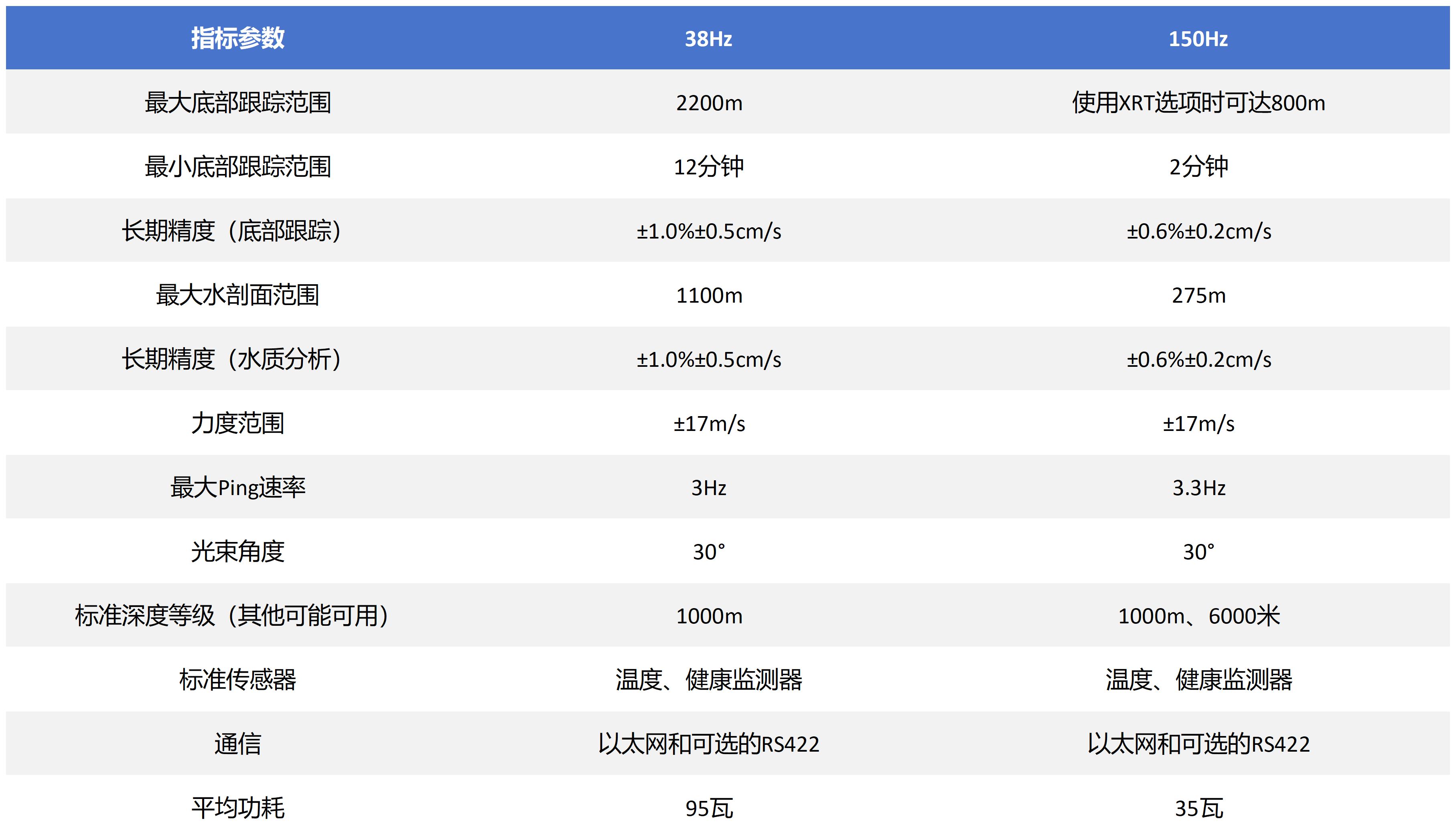
产品规格
应用案例
在线客服 服务电话: 010-8859 4300 电子邮件: sales@wedynamics.com.cn 工作时间:星期一至星期五 9:00 -17:30
Wedynamic Marine Systems Limited Copyright@2025 北京普思优创海洋技术有限公司 版权所有京ICP备2020049148号![]() 公安备 11010502049291号
公安备 11010502049291号

